
Nabigazio Autonomoa ROS-en
Sarrera hau beste hizkuntza hauetan dago eskuragarri: English, Español
Nabigazio autonomoa robotika mugikor autonomoaren funtsezko oinarrietako bat da, eta era berean, ikerketa-eremu aktibo bat, robotak ingurune dinamikoetan modu independentean (gizakiaren esku-hartzerik gabe) mugitzeko gaitzen dituena. Sentsore, algoritmo eta kontrol-sistema ugari erabiltzea dakar, ingurunea hauteman, ibilbide bat planifikatu eta helmuga baterantz modu seguruan nabigatu ahal izateko.
Bi nabigazio autonomo mota bereizten dira, ingurune motaren arabera:
- Indoor nabigazio autonomoa: barnealdeetan nabigatzea edo GPS seinalearen estaldurarik ez dagoenean edo behar besteko kalitaterik ez duenean egiten dena. Besteak beste, honako hauek dira indoor nabigazio autonomoaren aplikazioetako batzuk: biltegietako intralogistika, eraikinen barnealdeetako segurtasun-zaintza edo fabriketako ikuskapen-errutinak.
- Outdoor nabigazio autonomoa: kanpoko nabigazioa edo GPS seinalearen estaldura kalitatezkoa den tokietan ematen dena. Outdoor nabigazio autonomoaren aplikazio batzuk honako hauek dira: ibilgailuak modu autonomoan gidatzea, doitasunezko nekazaritza, miaketa eta kartografia, segurtasuna eta zaintza, etab.
Ikasturte honen hasieran, Tknikako Robotika Autonomoko espezializazio arlotik, ROS-en (Robot Operating System) oinarritutako indoor nabigazio autonomoari buruzko prestakuntza antolatu zen, eta Euskadiko Lanbide Heziketako hainbat ikastetxetako irakasleak bertaratu ziren. Prestakuntza horretan, indoor nabigazio autonomoaren alderdi nagusienak jorratu ziren:
- LiDAR teknologia (Light Detection and Ranging): indoor nabigazio autonomoan ingurunea hautemateko gehien erabiltzen den sentsore mota da.
- SLAM (Simultaneous Localization and Mapping): teknika konputazionalaren bidez, robotek aurrez ezagutzen ez dituzten inguruneen mapak eraikitzeko erabiltzen dute.
- AMCL (Adaptive Monte Carlo Localization): teknika konputazionalaren bidez, robotak gai dira beraien posizioa eta orientazioa kalkulatzeko, sentsorearen neurketak eta probabilitate estimazioa oinarri hartuta.
- ROS-en nabigazio stacka: ibilbideak planifikatzeko eta oztopoak saihesteko tresnen eta algoritmoen multzoa da. Planifikatzaile eta mapa global eta lokalak, eta berreskurapen algoritmoak ditu.
- Gazebo: kode irekiko 3D simulagailua, non robotak eta agertoki errealistak simulatu daitezkeen.
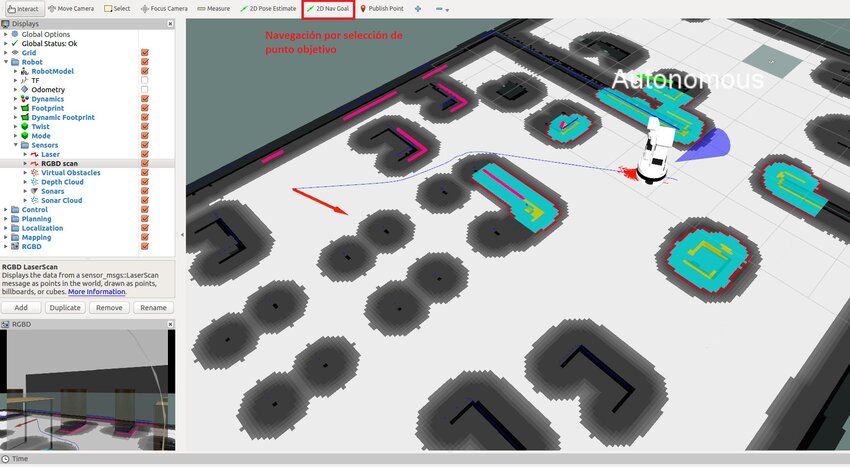
- RViz (ROS Visualization): 3D-n bistaratzeko kode irekiko tresna bat da, ROSen tratatzen diren datu guztiak bistaratzeko eta aztertzeko.
- Hainbat plataforma robotikoren simulazioa: Turtlebot, Tiago eta Jetbot (ROSekin bateragarriak diren robotak).
Ikastaro honetan eskuratutako ezagutzak, Tknikako Robotika Autonomoaren espezializazio-arloan benetako plataforma robotikoetan aplikatzeaz gain, sailburuordetzako honako berrikuntza proiektu hauetan ere aplikatzen ari dira:
- Aulki robotizatu autonomoa garun-paralisia duten eta mugikortasun-arazo larriak dituzten haurrentzat.
- ROSen garapena 2 robot autonomorentzat eta delta robot batentzat ekoizpen adimenduneko zelulan.
Bideo honetan, nabigazio autonomoaren kasu bat erakusten da, plataforma robotiko gisa JetAuto bat erabiliz. Bideoan ikusten den bezala, aldez aurretik SLAM bidez sortutako mapa bat oinarritzat hartuz, robotak nabigazioan zehar aurreikusi gabeko oztopoak topatzen ditu; oztopo hauek saihesten ditu eta helmuga gisa markatutako puntura iritsi ahal izateko ibilbidea berrartzen du.