
Autonomous navigation with ROS
This post is also available in the following languages: Euskara, Español
Autonomous navigation is one of the pillars of autonomous mobile robotics, and at the same time, an active field of research, which enables robots to move independently (without human intervention) in dynamic environments. It involves the use of multiple sensors, algorithms and control systems to be able to perceive the environment, plan a route and navigate safely to a destination.
Two types of autonomous navigation are distinguished, depending on the type of environment:
- Indoor autonomous navigation: navigation indoors or where GPS signal coverage is non-existent or does not have sufficient quality. Among others, intralogistics in warehouses, security surveillance inside buildings or inspection routines in factories are some of the applications of indoor autonomous navigation.
- Outdoor autonomous navigation: navigation outdoors or where GPS signal coverage has a good quality. Some applications of autonomous outdoor navigation are autonomous vehicle driving, precision agriculture, exploration and mapping, security and surveillance, etc.
At the beginning of this course, from Tknika’s Autonomous Robotics specialization area, a course about indoor autonomous navigation in ROS (Robot Operating System) was organized, which was attended by teachers from several Vocational Training centers in the Basque Country. This training covered the fundamentals that support autonomous indoor navigation:
- LiDAR (Light Detection and Ranging) technology: it is the type of sensor most used for the perception of the environment in indoor autonomous navigation.
- SLAM (Simultaneous Localization and Mapping): is the computational technique through which robots build the map of environments that they do not previously know.
- AMCL (Adaptive Monte Carlo Localization): is the computational technique through which robots are capable of determining their position and orientation based on sensor measurements and probabilistic estimation.
- ROS Navigation Stack: it is the set of tools and algorithms for trajectory planning and obstacle avoidance. It includes global and local planners and maps, and recovery algorithms.
- Gazebo: open source 3D simulator where it is possible to simulate robots and realistic scenarios.
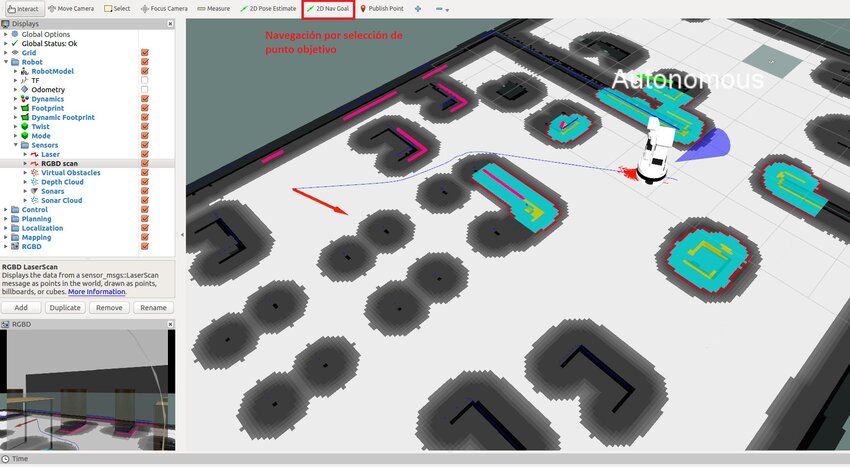
- RViz (ROS Visualization): is an open source 3D visualization tool to visualize and analyze all data that is being processed by ROS.
- Simulation of different robotic platforms: Turtlebot, Tiago and Jetbot (ROS compatible robots).
The knowledge acquired in this course is not only being applied on real robotic platforms in Tknika’s Autonomous Robotics specialization area, but also in the following vice-counsel innovation projects:
- Silla robotizada autónoma para niñas y niños con parálisis cerebral y con graves problemas de movilidad.
- Desarrollo en ROS para 2 robots autónomos y 1 robot delta en célula de producción inteligente.
The following video shows a demonstration of autonomous navigation using a JetAuto as a robotic platform. As seen in the video, there is a map previously created by SLAM, and during navigation, the robot encounters unforeseen obstacles; the robot avoids obstacles and resumes the trajectory to reach the point marked as the destination.