Ikaslab proiektua Bilboko BIEMH 2024 azokan
Sarrera hau beste hizkuntza hauetan dago eskuragarri: Español
AFMren gonbidapen bitartez Tknikan garatzen den proiektu bat aurkeztuko da Bilboko BIEMH 2024 azokan, zehazki WORKinn espazioan:
3D egiaztapen metrologirako estazio automatikoa:
Proiektu honetan garatutako irtenbideak bi eskaner eta robot kolaboratibo bat konbinatzen ditu, eta piezak erretilu batetik ausaz biltzeko asmoa du, bin picking bidez. Gero, eskaneatu egiten ditu, eta bigarren eskaner baten bidez neurtu. Azkenik, robot bera arduratuko da piezak modu ordenatuan jasotze-gune batean uzteaz.
Kalkulatutako neurketa-estazioa Ikaslab proiektuaren barruan garatu dugu, Tknikako Berrikuntza Teknologikoaren eta Sistema Adimendunen Arloa garatzeko testuinguruan. Esan beharra dago, halaber, Euskadiko LHko sare publikoko bi irakaslek garatu zuten aurreko proiektu baten bilakaeraren emaitza izan dela, LHko Sailburuordetzak bideratuta; zehazki, Mikel Atxegak, Bergarako Miguel Altuna LHII LHIkoak, eta Igor Urkiolak, Tolosaldea LHII LHIkoak.
Proiektuaren erronka nagusia konponbide hori garatzeko behar izan diren hardwareak eta softwareak egokitzea eta komunikatzea izan da. Zehazki, hauek erabili dira:
- Photoneo PhoXi D Scanner L bin picking-erako eskanerra, Bin Picking Studio softwarearekin.
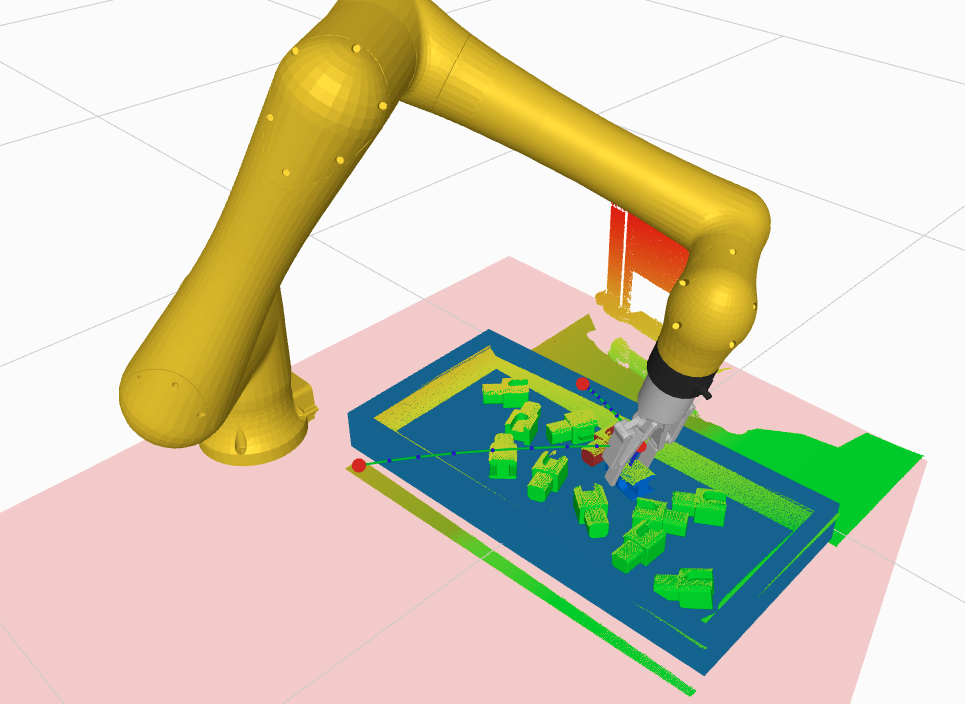
- Fanuc Robot CRX 10 iA robot kolaboratiboa, Teach Pendant Fanuc bidez kontrolatua, tabletaren bertsioa.
- Creaform-en Handy 700 eskaner eramangarria, IO Module eta VXScan softwareekin.
- Polyworks Inspektore metrologia-softwarea.
- Era berean, hiru garun konbinatzen dira: robotaren kontrolatzailea, Photoneo eskanerrarena (Bin Picking Studiorekin) eta gainerako softwareak instalatuta dituen hirugarren ordenagailua.
Hona hemen komunikazio-parametroetan azaldutako lan-sekuentzia:
- Fanuc programa nagusia exekutatu aurretik, bi software nagusiak aktibatzen dira; Bin Picking Studio softwarea deployment moduan jartzen da (hau da, hedapena egiten da), eta, aldi berean, IO module softwarea ordenagailuan abiarazten da.
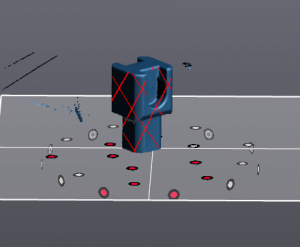
- Teach Pendant-en programa nagusia irekitzen da, eta hainbat azpiprogramak osatzen dute. Play sakatuko dugu, eta, programaren lehen urratsak egin ondoren, bin picking-aren errutinaz arduratzen den azpiprogramara iritsiko gara. Hori dela eta, eskanerrak inguruko eszena eskaneatzen du. Eszena hori saskiko piezen konposizioa eta kokapena aztertu beharko du, eskura dituenak identifikatzeko eta piezetatik zein hartu erabakitzeko. Ondoren, softwarearen pieza hartu da.
- Hurrengo urratserako, tresna osagarri bat asmatu eta fabrikatu da gehikuntzako fabrikazioaren bidez, bildutako piezak jarrera jakin batekin orientatzeko eta jartzeko. Hala, prozesatutako piezak nahita eta zehatz lotu ahal izango dira, hurrengo fasean erabat kontrolatuta utzi ahal izateko.
- Hurrengo etapa 3D eskaneatze-fasea da. Fase horretan, zehaztasun osoz digitalizatzen da neurtu beharreko pieza; kasu honetan, Creaform eskaner eramangarri batekin. Horretarako, agertoki bat prestatu da, azalera osoan dauden dianak dituena, eskaneatze azkarra eta fidagarria egiteko. Pieza gainazal horretan uzten den unea bat dator VXScan softwarea automatikoki aktibatzen duen eskaneatzeko azpiprograma exekutatzen den unearekin, eta robota arduratzen da pieza digitalizatzeko aukera ematen duten eskaneatze-iraganaldiak egiteaz, eskanerra robotari itsatsita baitago.
- Ondoren, eskaneatzea amaitutzat ematen da; eskaneatutako piezaren adierazgarri izango den STL fitxategi bat sortzen da, eta IO Module-k egiaztapenaz arduratzen den softwarea aktibarazten eta exekutatzen du.
- Egiaztapen-fasean, Polyworks Inspektore softwarea da protagonista. IO Moduleko edukiari eta konfigurazioari eta neurketa-programaren edukiari esker, lortu berri den STLa automatikoki kargatzea lortzen da programan, eta CAD teorikoarekin alderatzea. Kasu zehatz honetan, kolore-mapa bat lortzen da, piezaren gainazal osoan zeharreko desbideratze dimentsionalari buruzko informazio osoa ematen duena. Horretaz gain, egiaztapen zehatzak egiten dira, dimentsio zehatzak perdoi dimentsionalen bidez egiaztatuz, fabrikatutako erreferentziaren planoan zehaztutako perdoi geometrikoekin batera. Txosten elkartu bat sortzen da pieza berri baten neurketa egiten den bakoitzean.
- Azkenik, robotak, pintzekin, pieza hartzen du berriro, eta zikloa ixten du, pieza piezak biltzeko diseinatutako tresnan utzita.
Sistemak ia infinitu lan egin ahal izango du begiztan, baldin eta erretiluak pieza irisgarri eta amarragarritzat jotzen diren piezak baditu, eta bilketa-estazioak bilketa-espazioa ematen badu.
Hemen garatutako sistemak bere alde izan du ingurune garbi eta mesedegarrian egin dela. Baina, benetan bere eginkizuna bete badu ere, irtenbide horretan hainbeste ekipo, marka eta hardware-tipologia konbinatzen dira, non horiek integratzea bakarrik tamaina handiko erronka izan den. Horrelako proiektuen kasu gehienetan gertatuko da hori, teknologia horiek guztiak etengabe aldatzen ari baitira.